Accueil > ARDUINO > Capteurs > accéléromètre et gyroscope MPU6050
accéléromètre et gyroscope MPU6050
lundi 30 novembre 2015, par
La capteur MPU6050 contient à la fois un accéléromètre 3 axes et un gyroscope 3 axes qui communique via i2c (datasheet). Dans cet article, je vais me limiter à déterminer l’angle de rotation autour de l’axe Y.

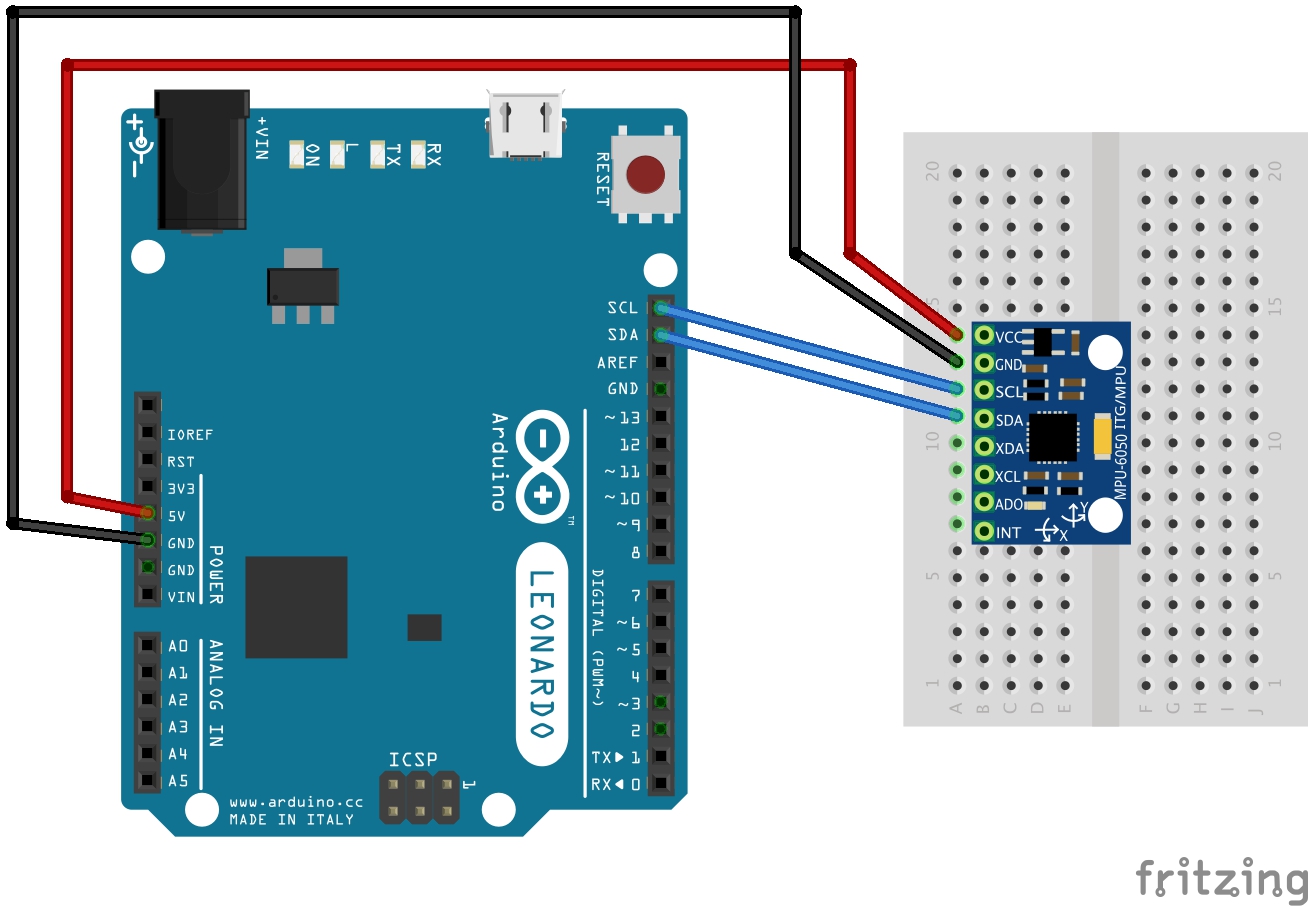
Les branchements
Récupérer les données "bruts" du capteur.
Sur la page http://playground.arduino.cc/Main/MPU-6050, on a un exemple d’utilisation de la bibliothèque wire.h (i2c) pour récupérer ces données (voir "short example sketch").
Dans la suite de l’article, je vais plutôt utiliser la bibliothèque développée par Jeff Rowberg. Son projet complet est accessible à cette adresse http://www.i2cdevlib.com/.
Pour poursuivre, il faut donc installer les bibliothèque "i2c" et "MPU6050" sous licence MIT qui se trouvent à l’adresse : https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/I2Cdev et https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
Télécharger et décompresser dans ../Arduino/librairies les 2 fichiers suivants :

- I2Cdev.zip
- MPU6050.zip
On utilise le programme suivant pour récupérer les données (les datas s’affichent toutes les 100 ms sur le terminal série) :
Déterminer l’angle d’inclinaison autour de l’axe Y à partir du gyroscope.
Le gyroscope nous donne la vitesse angulaire en rad/s. On a donc la relation suivante (Gy, vitesse de rotation autour de l’axe Y, angle=angle d’inclinaison) :
d(angle)
Gy= --------- d'où d(angle)=Gy.dt donc
dt
angle("actuel")=angle("précédent")+Gy.dtDans le programme suivant, le dt est fixé à 10ms=0,01s (cf tempo en fin de programme).
Si on lit la documentation, page 12, on voit qu’il faut diviser la valeur lue pour Wy par 131 pour obtenir la vitesse en °/s. Par conséquent, l’équation finale de l’angle est donc : angle=angle+Gy*0.01/131
Malheureusement, au fur et à mesure, le gyroscope dérive et n’est donc pas fiable. Il suffit de partir d’un angle=0°, tourner le capteur de 90° et revenir ... on n’obtient pas 0 !
Déterminer l’angle d’inclinaison autour de l’axe Y à partir de l’accéléromètre.
L’accéléromètre permet d’obtenir l’angle à partir de la mesure du vecteur de pesanteur. Voir schéma :
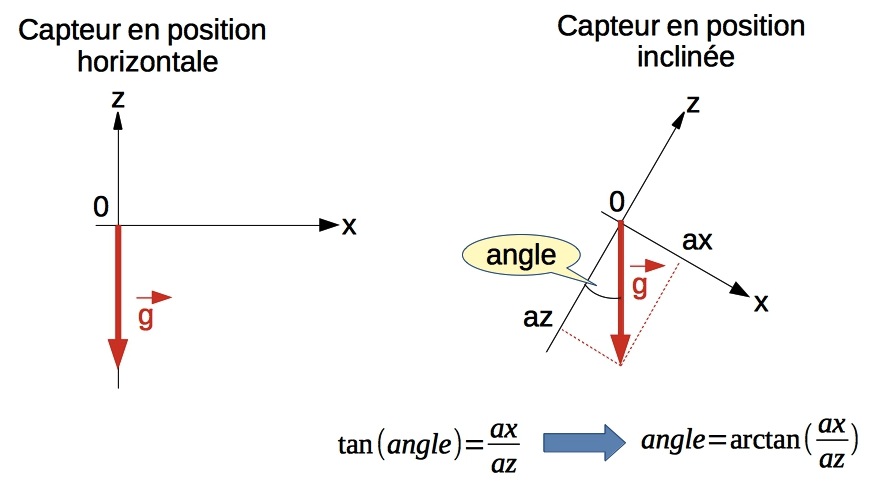
Dans le programme suivant, on va utiliser la bibliothèque "math.h" pour pouvoir utiliser la fonction "arctan". Le programme arduino est le suivant :
Problème : l’accéléromètre est sensible à la moindre vibration. Ainsi, apparaissent des mesures "parasites".
Mesurer l’angle en combinant le gyropode et l’accéléromètre avec un "filtre complémentaire"
On a vu précédemment que le gyroscope dérive et l’accéléromètre présente des mesures brusques "parasites". On va donc combiner les 2 en se débarrassant des variations "lentes" du gyroscope (filtre passe haut) et des variations "rapides" de l’accéléromètre (filtre passe-bas). Pour cela, on utilise un "filtre complémentaire".
Explications sur le filtre complémentaire :http://www.pieter-jan.com/node/11
Ainsi, l’équation de l’angle va être : angle=0,98x(angle +Gy*0.01/131 ) + 0,02x(angle de l’accéléromètre en °)
On peut affiner les coefficients 0,98 et 0,02 du moment que leur somme reste égale à 1
Le programme arduino :
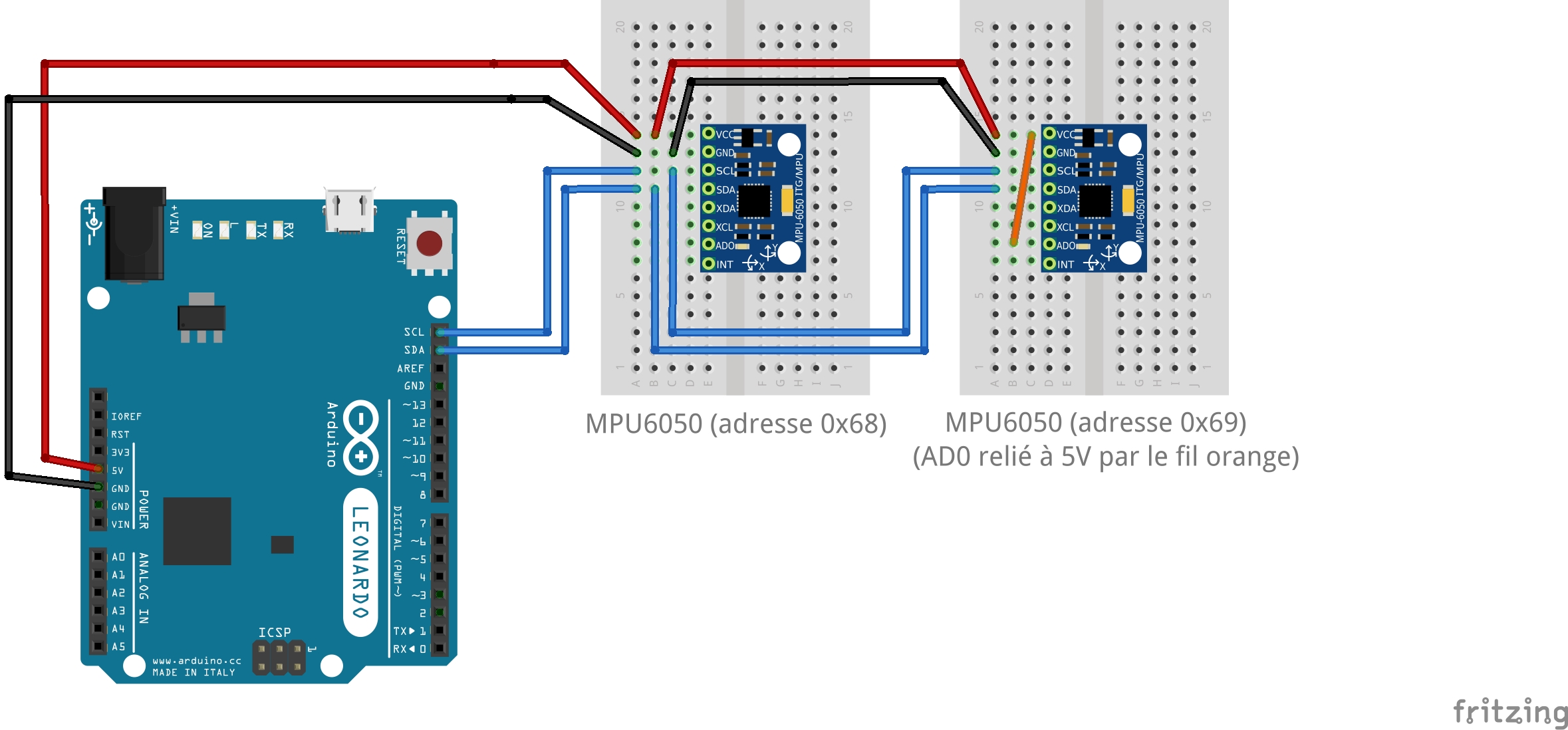
Connecter 2 capteurs MPU6050 sur le bus i2c
On peut mettre 2 capteurs sur le bus i2c. Pour cela, il suffit d’agir sur la broche AD0 :![]() si AD0=0 (ou laissé en l’air) : l’adresse du capteur en hexadécimal est 0x68,
si AD0=0 (ou laissé en l’air) : l’adresse du capteur en hexadécimal est 0x68,![]() si AD0=1, l’adresse du capteur en hexadécimal est 0x69
si AD0=1, l’adresse du capteur en hexadécimal est 0x69
Ainsi, si l’on souhaite utiliser 2 capteurs, on les relier a sur le bus i2c de la façon suivante :
Le programme arduino.
On crée 2 instances de l’objet MPU6050 :
- accelgyro1(0x68)
- accelgyro2(0x69)
Si on ouvre le terminal série, on obtient les 2 angles qui s’affichent :
