Warning: Illegal string offset 'format_dest' in /var/www/sdb/8/7/gilles.thebault/ecrire/inc/filtres_images_lib_mini.php on line 958
Warning: Illegal string offset 'format_source' in /var/www/sdb/8/7/gilles.thebault/ecrire/inc/filtres_images_lib_mini.php on line 961
Accueil > ARDUINO > Drivers moteurs > Arduino & shield L298 (Driver pour moteur à courant continu)
Arduino & shield L298 (Driver pour moteur à courant continu)
dimanche 28 février 2016, par
Caractéristiques.
Source : http://www.dfrobot.com

Source : http://www.elecfreaks.com
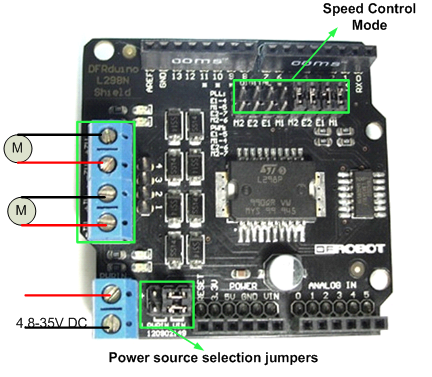
Le Shield L298 permet de commander 2 moteurs à courant continu dans les 2 sens de rotation avec variation de vitesse ( commande PWM). On trouve des versions similaires chez Elecfreaks et DFRobot![]() documentation du L298N
documentation du L298N![]() la page des caractéristiques du shield chez DFRobot
la page des caractéristiques du shield chez DFRobot![]() la page des caractéristiques du shield chez ElecFreaks
la page des caractéristiques du shield chez ElecFreaks![]() le circuit comporte 2 ponts en H,
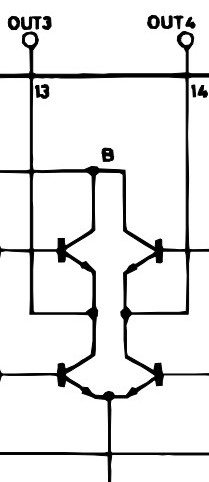
le circuit comporte 2 ponts en H,
![]() intensité maximale : 2A,
intensité maximale : 2A,![]() tension alimentation : de 4,8V à 35V
tension alimentation : de 4,8V à 35V![]() les broches du shield DFRobot DRI0009 ou elecfreaks L298 :
les broches du shield DFRobot DRI0009 ou elecfreaks L298 :
| Broche | Fonction | Broche | Fonction | |
|---|---|---|---|---|
| 4 | direction moteur 1 | 5 | commande PWM moteur 1 | |
| 7 | direction moteur 2 | 6 | commande PWM moteur 2 |
Branchements

Programmes arduino
Exemple 1 : Un programme qui permet de commander en tout ou rien un moteur à courant continu M1 : ![]() commander le moteur pendant 2s,
commander le moteur pendant 2s,![]() stopper pendant 2s,
stopper pendant 2s,![]() inverser le sens de rotation pendant 2s,
inverser le sens de rotation pendant 2s,![]() arrêter pendant 2s
arrêter pendant 2s
Exemple 2 : On va maintenant commander le moteur en vitesse variable. On va donc utiliser une sortie PWM. Le moteur accélère jusqu’à atteindre sa valeur maximale puis revient à vitesse nulle. Si on souhaite tourner dans l’autre sens, on modifie digitalWrite(M1DIR, 0) .
La variation de vitesse du MCC est réalisée par la commande PWM (a = rapport cyclique codé sur 8 bit - de 0 à 255 - ) : analogWrite(M1PWM, a) ;