Accueil > ARDUINO > Drivers moteurs > Arduino & L298 sur breakout board (en driver pour Moteurs à courant (...)
Arduino & L298 sur breakout board (en driver pour Moteurs à courant continu)
lundi 9 janvier 2017, par
Caractéristiques.

Le Shield L298 permet de commander 2 moteurs à courant continu dans les 2 sens de rotation avec variation de vitesse ( commande PWM). ![]() documentation du L298N
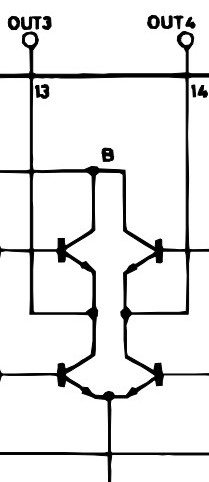
documentation du L298N![]() le circuit comporte 2 ponts en H,
le circuit comporte 2 ponts en H,
![]() intensité maximale : 2A,
intensité maximale : 2A,![]() tension alimentation puissance : de 5V à 30V
tension alimentation puissance : de 5V à 30V![]() les broches de la carte :
les broches de la carte :
| Broche | Fonction | Broche | Fonction | |
|---|---|---|---|---|
| ENA | autorisation de fonctionnement moteur A | ENB | autorisation de fonctionnement moteur B | |
| IN1 & IN2 | commandes du moteur A | IN3 & IN4 | commandes du moteur B | |
| GND | masse logique de commande et puissance | 5V | alimentation logique de commande | |
| +12V | alimentation partie puissance | |||
| OUT1 & OUT2 | branchements moteur A | OUT3 & OUT4 | branchements moteur B |
![]() par défaut, des "jumpers" relient ENA et ENB à 5V pour autoriser le fonctionnement des 2 moteurs
par défaut, des "jumpers" relient ENA et ENB à 5V pour autoriser le fonctionnement des 2 moteurs![]() Commande en tout ou rien des moteurs :
Commande en tout ou rien des moteurs :
| IN1 | IN2 | moteur A | |
|---|---|---|---|
| 0 | 0 | Arrêt | |
| 0 | 1 | rotation sens 1 | |
| 1 | 0 | rotation sens 2 |
| IN3 | IN4 | moteur B | |
|---|---|---|---|
| 0 | 0 | Arrêt | |
| 0 | 1 | rotation sens 1 | |
| 1 | 0 | rotation sens 2 |
![]() commande PWM avec variation de vitesse
commande PWM avec variation de vitesse
| IN1 | IN2 | moteur A | |
|---|---|---|---|
| 0 | 0 | Arrêt | |
| 0 | PWM | rotation sens 1 | |
| PWM | 0 | rotation sens 2 |
| IN3 | IN4 | moteur B | |
|---|---|---|---|
| 0 | 0 | Arrêt | |
| 0 | PWM | rotation sens 1 | |
| PWM | 0 | rotation sens 2 |
Branchements

Programmes arduino
Exemple 1 : Un programme qui permet de commander en tout ou rien un moteur à courant continu Ma : ![]() commander le moteur pendant 2s,
commander le moteur pendant 2s,![]() stopper pendant 2s,
stopper pendant 2s,![]() inverser le sens de rotation pendant 2s,
inverser le sens de rotation pendant 2s,![]() stopper pendant 2s
stopper pendant 2s
Exemple 2 : On va maintenant commander le moteur en vitesse variable. On va donc utiliser une sortie PWM. Le moteur accélère jusqu’à atteindre sa valeur maximale puis revient à vitesse nulle. Si on souhaite tourner dans l’autre sens, on utilise digitalWrite(IN2, 0) au lieu de digitalWrite(IN1, 0).
La variation de vitesse du MCC est réalisée par la commande PWM (a = rapport cyclique codé sur 8 bit - de 0 à 255 - ) : analogWrite(IN1, a) ;
Pour commander le pont H "1", il faut utiliser 2 sorties avec PWM notées